
潭子凸轮分割器的原理和结构
机构原理和结构
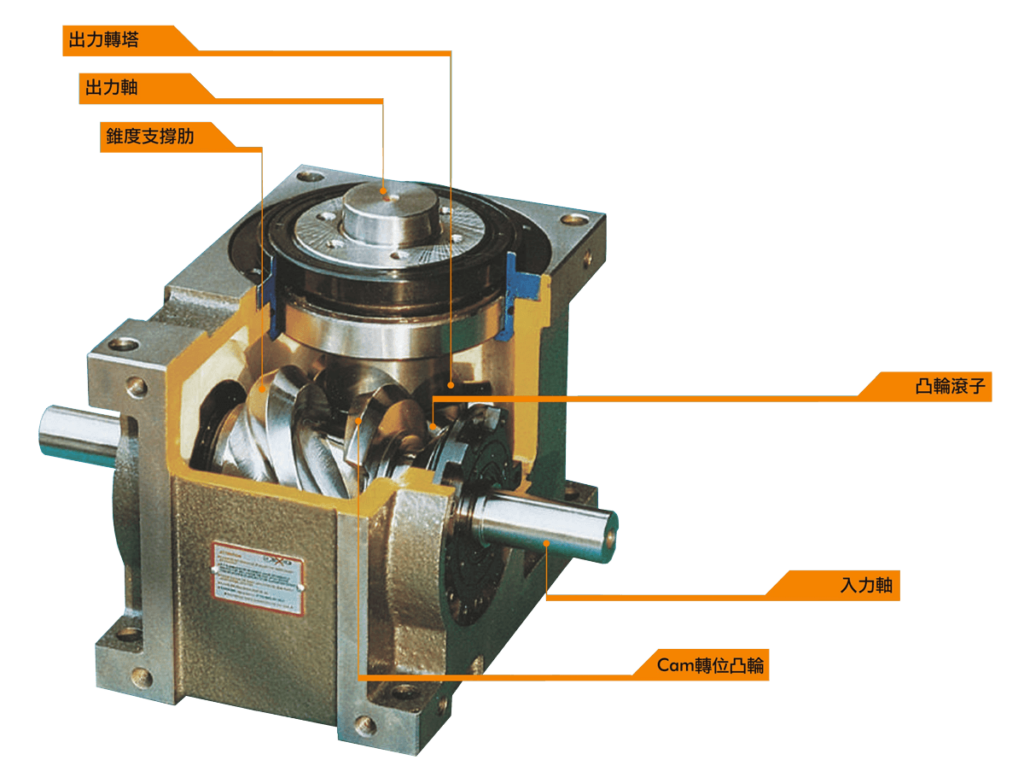
潭子精机的分割器其结构的设计是,安装在入力轴中的Cam转位凸轮与固定在出力轴的出力转塔连接, 如图1所示,以径向嵌入在出力转塔圆周表面的凸轮滚子,与凸轮的锥度支撑肋在它们相应的斜面作线性接触。
当入力轴旋动时,凸轮滚子按照设定的位移曲线旋动出力转塔,而同时又沿肋的斜面滚动。在肋与凸轮的端面平衡区域里, 即在静态范围内,滚子接通其轴,但出力转塔本身并不旋转。
锥度支撑肋通常与两个或三个凸轮滚子接触,以便入力轴的旋转可均匀地傅递到出力轴。
如果锥度支撑肋的凸轮表面和凸轮滚子之间有不滑顺情况,则会损害到分割器。
通过旋转支撑入力轴的偏心轴承座,可调整入力轴和出力轴之间的距离, 能完全排除不滑顺的现象。换句话来说,通过调整轴之间的距离可消除旋转不顺畅的现象。可通过调整预压负荷来接近凸轮的弹性区, 从而加强分割区的刚性。
其结构和功能是Cam转位凸轮和凸轮滚子相结合的最佳性能,能进行高速操作。
凸轮分割器的术语和定义
- Cam转位凸轮:凹槽切入筒形实心体表面,并固定到入力轴的凸轮▫
- 锥度支撑肋:锥形肋位于锥度支撑肋的圆周上,在凸轮凹槽之间,与凸轮磙子的圆周线性接触。
- 凸轮滚子:精密设计的凸轮滚子采用由潭子精机开发的滚子轴承,其设计可经受重负荷。
- 出力转塔:附在出力轴上,而滚子径向嵌入出力转塔。其准确度是生产潭子精机分割器最重要的因素。
- 停动数:出力轴每一旋转的停动数。
- 动角(凸轮分度角):入力轴旋转角要求执行一次分度运动。角度越大,运动越平稳。
- 停止角:当出力轴固定时,入力轴旋转的角度。这角度和题动角的总和为360。
- 旋转数:入力轴的旋转数。(每分钟)
- 静态扭矩:在固定位置下最大扭矩可施加到出力轴上。如果施加的扭矩大于这个数值,则会损坏分割器。
- 动态扭矩:在分度期间,作用在出力轴上的最大扭矩。
潭子分割器的运动曲线分类
- 非连续曲线
- 双暂停对称曲线
- 双暂停非对称曲线
- 单暂停曲线
- 无暂停曲线
在空间连接两点有无数的曲线。对于分割器使用的每一种运动图皆有无数的曲线连接起点和终点。当设计分度运动时,曲线的使用有必要尽量平稳。为此,应考虑材料的振动、噪音和刚性,也应考虑负荷和速度。
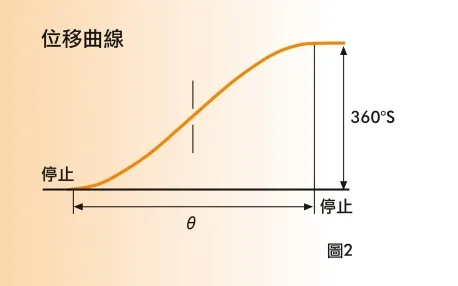
在考虑了所有因素之后,一般采用强调速度、加速和跳动性能的曲线。加速,对于分割精确度和凸轮及凸轮滚子的寿命有着特别重要的影响。位移曲线表示入力轴位移(旋动时间、角度等)与出力轴位移间的关系,如图2所示。图中的横坐标轴表示入力轴的位移,纵坐标轴表示出力轴的位移。
1.非连续曲线
包括等速度曲线和等加速度曲线。这些曲线并不是合乎需要的,因为速度和加速度不连续,会导致较大的冲击。
2.双暂停对称曲线
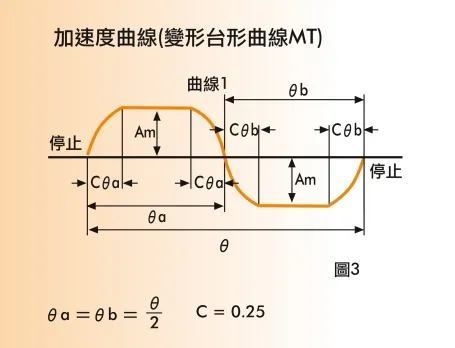
包括变形正弦曲线和变形梯形曲线。就速度和加速度而论,这些曲线连续,因此它们合乎需要。而且,甚至如果入力轴的旋转方向为反向,也可以获得相同的运动。
3.双暂停非对称曲线
包括非对称摆线曲线和非对称变形梯形曲线。这些曲线适合高速旋转。因为减速范围比加速范围长,以便控制减速范围内的振动数量。
当选择凸轮曲线时,有必要考虑下面特性数值:
- Vm- 最大速度
- Am – 最大加速
- Jm – 最大跳动
如果Vm较大,在突然停动时会受到较大的力,因此,一般最好是Vm的数值小。特别是,如果负荷重,更有必要选择小的Vm。另外,Vm与凸轮的尺寸密切相关。因此,如果曲线有较小的Vm,则凸轮的尺寸必须相应减少。另外,V不能大于1.76。
如果凸轮的曲线有大的Am,最大可允许负荷变得较小。因此,如果在高速下传动,就有必要选择较小的Am曲线。在这种情沉下,Am不能小于4。Jm与振动有关,因此最好Jm的值较小。
潭子精机的分度传动装置标准曲线
由下面四种类型组成:
变形台形曲线(MT)
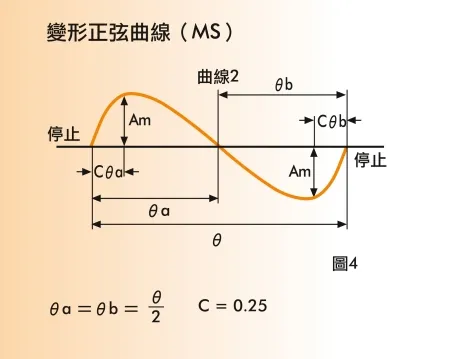
变形正弦曲线(MS)
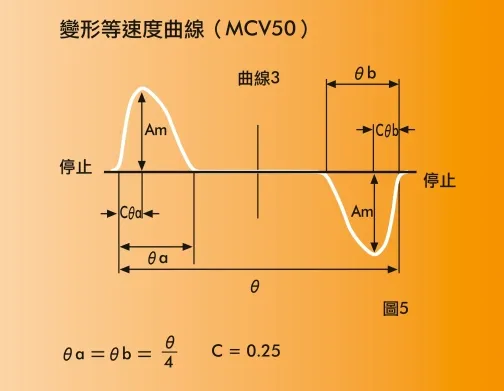
变形等速度曲线(MCV50)
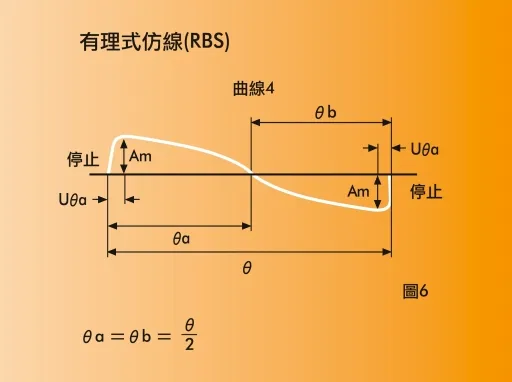
有理式仿线(行政院国科会,中山大学机械研究所,潭子精机共同研发创新曲线)(RBS)
如有需要,潭子精机可提供上述曲线以外的特殊曲线。