当运动的角度或距离比速度和功率更重要时,某些电机会发出更亮的光芒,例如步进电机,以它们在施加控制电压时采取的各个步骤命名。
想象一下,设计一台必须在空白金属样品上切割精确孔和凹槽的机器。您连接一个简单的直流电机并准确判断移动 1.000 英寸需要多长时间。利用此采样时间,您可以设计一个复杂的程序来加工零件的所有各种特征。在第一次运行时,由于钻头与零件的相互作用,电机会稍微减速,不会像您想要的那样移动。
这是精确控制的一个糟糕的例子。我并不是说直流电机的设计很差,只是说它们的优势不在于以精确的距离间隔精确启动和停止。交流电机也是如此。
在这些情况下,我们求助于更先进的运动解决方案,包括伺服电机(将测量设备和算法绑在直流或交流电机的末端),或者我们可以使用步进电机,这是一种专用机构,无需额外的测量反馈传感器即可驱动极其精确的运动。
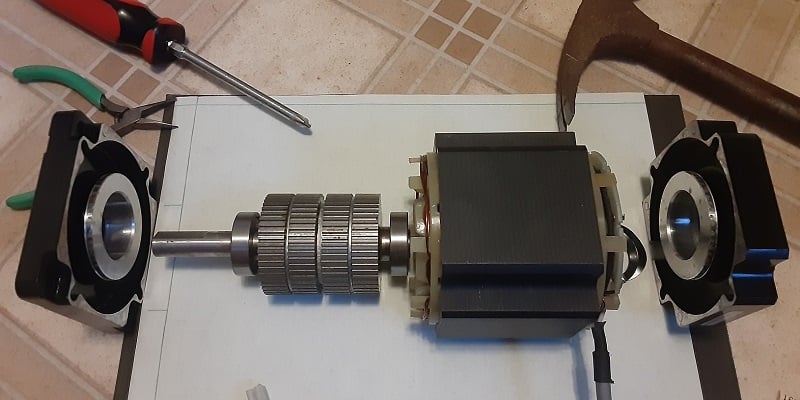
图 1.NEMA 34步进电机组件的完整视图。
什么是步进电机?
步进电机之所以如此命名,是因为定子和转子与直流电机和同步电机相比,与更多的磁相互作用点相互作用。大多数步进电机在电机内部有 200 个这样的相互作用点。通过 200 步,每步的精度为 1.8°。
为了实现更高级的控制,一些线圈可以在正向和负向上提供部分电流,从而产生了一种称为“微步进”的概念,它可以在标准步进距离的极小部分推进电机。一些微步算法可以为每个完整步骤生成多达 256 个微步,这意味着每个步骤的精度为 0.007°。这听起来不错,但由于保持扭矩降低,它实际上只适用于非常低的扭矩应用。
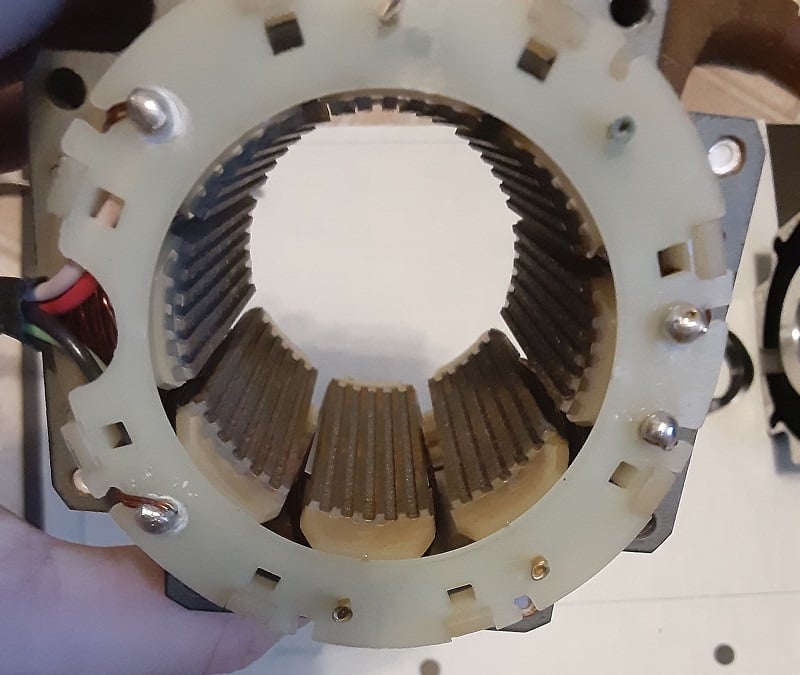
图2.电机的外部(定子)包含绕组,绕组可以完全或部分磁化,通常在两个方向上,以实现出色的控制。
由于精度优先于速度,这些电机不用于驱动重负载或高连续速度。所需的控制电路增加了复杂性并降低了电气效率。想想看,你是否愿意编写一个程序并包含一个特殊的附加运动模块来驱动电机……或者简单地将两根引线连接到电源电压继电器?它们在需要精度的启动/停止应用中表现出色:CNC轴、线性平台、3D打印机机架、检测相机运动等。
步进电机如何工作?
在内部,步进电机看起来更像是交流电机,而不是直流电机。典型的直流电机需要电刷来交替流向转子磁线圈的电压。然而,交流电机利用电力的自然交替来激励电机外部的绕组,而与转子的铁芯没有连接。如果我们看一下步进机的内部,它会让人想起交流转子。

图3.步进电机的转子不像普通直流电机那样有换向器或电刷。
为了保持运动在可预测的方向上,转子和励磁绕组上的磁极(磁相互作用点)无法完美对齐。如果是这样,电机将前进一整步,然后随着下一个控制信号的出现,电机可能会随机移动 CW 或 CCW 以达到下一步,这可能是灾难性的。
相反,转子和定子上的极数不相等,因此它们不可能一直对齐。当线圈组通电时,转子上可见的小齿将推动或拉动转子,使其与适当的线圈完美对齐,并将其牢固地固定到位。然后,下一个控制信号将为下一组线圈通电,转子将再移动 1.8° 并再次固定到位。
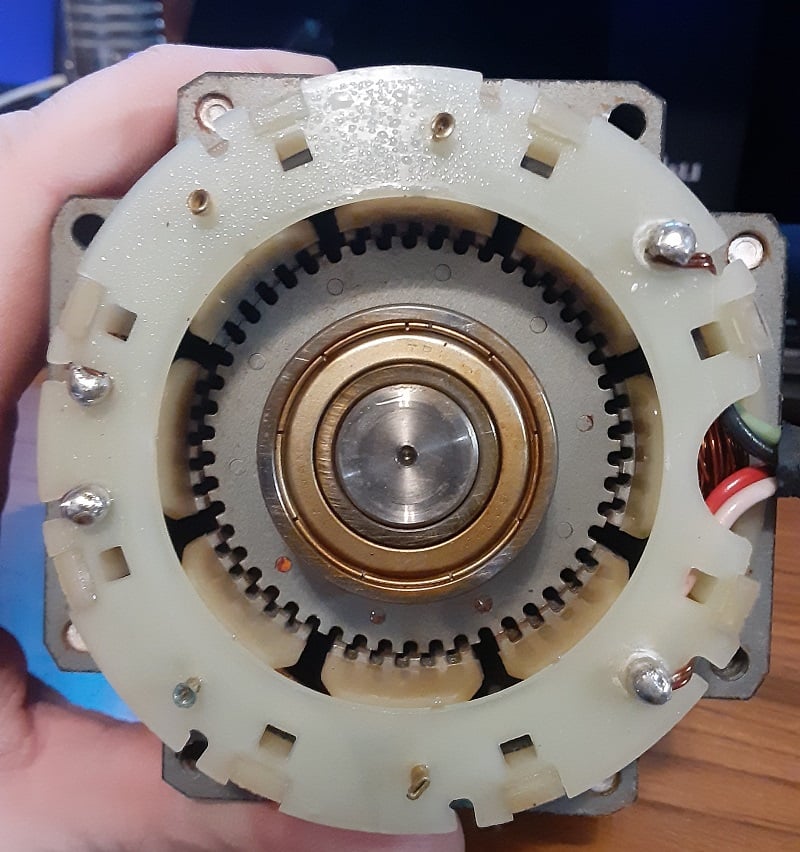
图4.转子和定子上的极数不匹配,因此它们在某些地方对齐,但一直对齐。
为了加强微步进的概念,两个线圈可以各自对其中一个牙齿保持相等的吸引力,将该齿保持在线圈之间的中间。这意味着在标准运动中,每走一步就可以达到两个独特的步骤。线圈之间电压的进一步分配可以更精确地进行微步进。
由于转子是通过微步进向两个方向拉动的,因此实际上用手(或外部负载)旋转电机变得更加容易,因为两个磁场都想拉动转子。这意味着随着微步进力变得更加不均匀,保持扭矩会显着降低。
如何驱动步进电机?
当然,正如您可以可视化 CNC 机床轴一样,我们需要电机根据场景以不同的速度移动:不同的进料、点之间的快速传输、归位等。必须有一种方法来控制线圈的交替速度,就像三相电机的变频器一样。
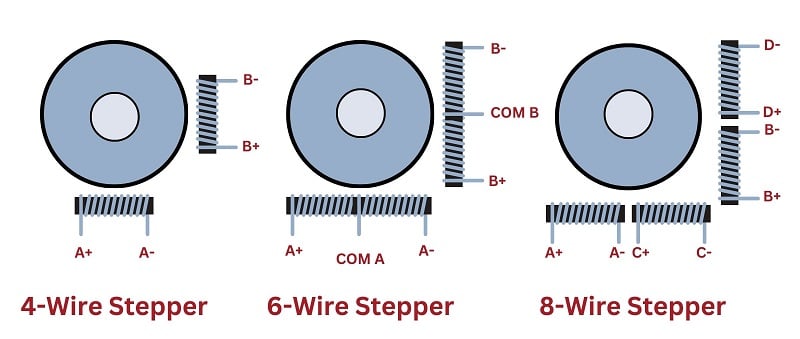
步进电机控制器板专为 4 线、6 线和 8 线步进电机而设计。这些布线场景中的每一个都可以在线圈的两个方向上产生直流电压,以推动或拉动转子,但任何步进电机都只能为这些设置之一接线。您必须知道您拥有的电机才能选择合适的驱动板。
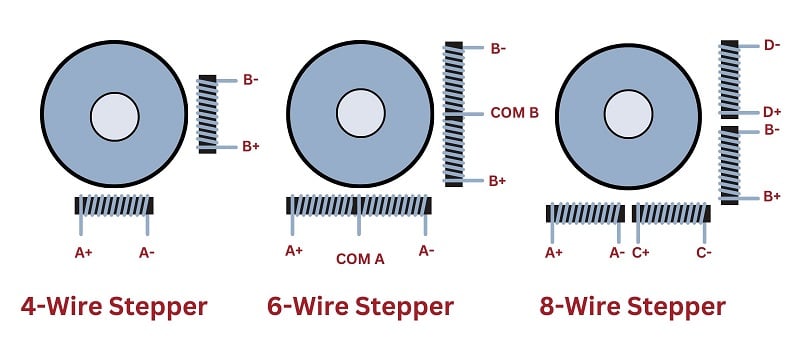
图5.4 线、6 线和 8 线步进器的接线方案。
4线步进电机
带有 4 线的电机是双极性的,这意味着两个线圈组分布在转子周围,每个线圈组可以用正或负(双极)电压驱动。
6线步进电机
6 线电机包含两个线圈,每个线圈都有一个中心抽头。它们通常是单极性的(一个电压方向),中心抽头带正电,两个线圈端交替接地。在某些情况下,中心抽头也可以交替使用,从而产生双极 6 线电机,但这是由于驱动板的功能,而不是电机。它仍然是一个 6 线步进电机。
8线步进电机
最后,最复杂的电机有四组交替的线圈,它们可以单独连接到 8 线驱动板,也可以将它们与中心抽头在外部粘合以形成 6 线电机,或者最后,它们可以串联或并联外部以形成 4 线电机的变体。灵活,但更复杂。
步进驱动器的控制信号
控制器(如PLC或运动控制器)向步进驱动器发送一组信号。该信号将包含一个过渡沿(触发)脉冲以及一个步进方向输入的方向。或者,可以为正向或反向(CW-CCW输入)提供过渡脉冲。大多数驱动板都遵循第一个(步进-目录)方案。

图6.多种尺寸的步进电机驱动板。
选择步进电机
步进电机有四个主要特点。首先是电线的数量,我们已经讨论过了。保持扭矩通常以 oz-in 表示,它决定了在打滑之前可以对电机施加多大的力。每个线圈中的电流(以 mA 或 A 为单位)必须由适当尺寸的驱动板提供。由于大多数驱动器可以提供各种可调输出电压,因此绕组的电阻应与驱动器中的电流设定限值相匹配。
步进电机遵循正确的设计步骤可能很棘手,但它们是设计和构建各种应用中精密直线运动的重要资产。